KIẾN THỨC CƠ BẢN VỀ ROBOT CÔNG NGHIỆP
ROBOT CÔNG NGHIỆP LÀ GÌ?
Theo tiêu chuẩn ISO, robot công nghiệp được định nghĩa là một máy điều khiển lập trình mà có thể được điều khiển một cách tự động và có thể lập trình theo ba hoặc nhiều trục.
Từ máy điều khiển ở đây được dùng để đề cập đến thiết bị có chức năng như cánh tay con người để hoàn tất các nhiệm vụ khác nhau.
Và theo định nghĩa trên, bất cứ loại máy chuyên dụng nào có một cánh tay giống như cần cẩu được điều khiển bởi PLC hoặc một thiết bị tương tự đều là một ví dụ hoàn hảo về robot công nghiệp.
CHỨC NĂNG CỦA ROBOT CÔNG NGHIỆP
- Robot được dùng để di chuyển vậ thể từ điểm này đến điểm khác liên tục và nhất quán ở tốc độ cao giúp tăng năng suất lao động.
- Có khả năng thiết lập nhiều chương trình cho nhiều tác vụ điều khiển khác nhau nên mức độ linh hoạt cao.
- Các chuyển động của robot có thể tự do thay đổi như mong muốn, có thể dễ dàng nâng cấp hoặc triển khai tích hợp
- Hoạt động tin cậy
- Có thể thực hiện các chuyển động phức tạp
- Vận hành chính xác theo trình tự được lập trình từ trước nên có khả năng hoạt động chính xác và tỉ lệ lỗi sản phẩm nhỏ
AN TOÀN KHI VẬN HÀNH ROBOT
Các thao tác với robot công nghiệp được quy định là hoạt động nguy hiểm nên bắt buộc người vận hành phải hoàn thành khóa đào tạo chuyên môn bắt buộc với chúng. Ngay cả người lập trình, set up robot cũng cần đặc biệt chú ý an toàn khi vận hành với robot.
Luật pháp đã bắt buộc các công ty phải lắp đặt hàng rào bảo vệ và tuân thủ các tiêu chuẩn nghiêm ngặt khi vận hành, thực hiện triệt để các thông điệp cảnh báo; thực hiện các biện pháp phòng ngừa an toàn khác cho mục đích quản lý.

PHÂN LOẠI ROBOT CÔNG NGHIỆP
Theo kết cấu cơ học, robot công nghiệp gồm những loại sau:
Robot hệ tọa độ Đề-Các
- Được trang bị một cánh tay có kết cấu cơ học với ba khớp nối tuyến tính được bố trí theo hệ tọa độ Đề-Các
- Có độ cứng cao và định vị chính xác, dễ dàng điều khiển
- Tốc độ di chuyển không quá cao, phạm vi hoạt động nhỏ hơn so với khu vực lắp đặt
- Thích hợp cho các ứng dụng gắn/gỡ các vật hể gia công từ các dây chuyền, các thao tác đòi hỏi định vị XY, các thao tác kê hàng và các tác vụ điều khiển đòi hỏi độ chính xác cao.

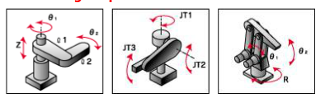
Robot hệ tọa độ hình trụ
- Được trang bị một cánh tay có kết cấu cơ học hợp với một khớp xoay và một khớp tuyến tính được bố trí dọc theo các tọa độ hình trụ
- Phạm vi hoạt động mở rộng không chỉ phía trước mà cho cả hai bên
- Chuyển động bị giới hạn dọc theo các đường chéo trên và dưới, gây khó khăn cho các thao tác phức tạp
- Có độ cứng cao, định vị chính xác và dễ điều khiển.
- Có tốc độ tuyến tính nhanh hơn ở đầu mũi do thao tác của các khớp xoay
- Tối ưu xử lý các thao tác như gắn kèm vật gia công vào máy và đưa vật thể vào trong hộp hoặc khay chứa.

Robot dùng tọa độ cực (hiện nay ít sử dụng)
- Phạm vi hoạt động mở rộng theo các hướng lên và xuống, cho phép cánh tay được xoay lên và xuống theo các vị trí thấp hơn hoặc cao hơn với thân robot.
- Không sử dụng loại robot này cho việc vận chuyển các vật thể nặng như các loại robot khác
- Loại robot này tối ưu để sử dụng cho các thao tác điều khiển phức tạp như hàn điểm, sơn hoặc tạo đường bao giai đoạn

Robot dùng khớp nối
- Được trang bị một cánh tay với kết cấu cơ học có ít nhất 3 khớp xoay
- Khả năng quấn quanh tốt cho phép thực hiện những thao tác phực tạp
- Tối ưu cho các thao tác tốc độ cao, trong đó các cánh tay chạy theo chuyển động tròn
- Chúng được sử dụng trong các thao tác lắp ráp, để di chuyển theo các mặt cong phức tạp và các nhiệm vụ tương tự.
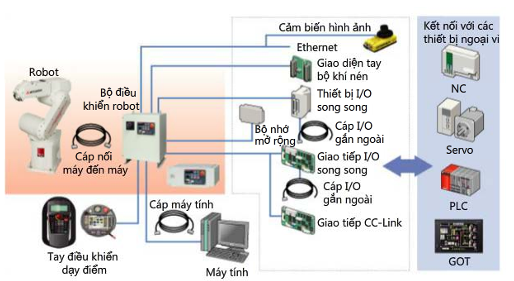
KẾT CẤU TIÊU CHUẨN CỦA ROBOT CÔNG NGHIỆP
Kết cấu tiêu chuẩn của robot công nghiệp gồm những thành phần sau:
- Thân robot
- Bộ điều khiển robot
- Tay điều khiển (Teaching Pendant)
- Cáp kết nối
MỘT SỐ ỨNG DỤNG CỦA ROBOT
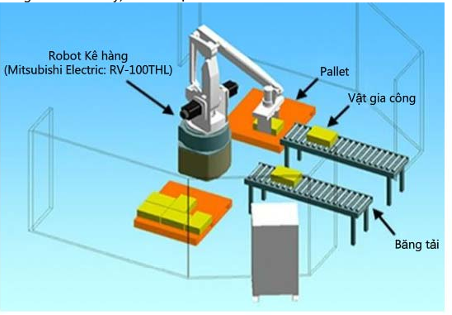
Ứng dụng kê hàng
- Chủ yếu trong các quá trình giao hàng tại nhà máy và nhà kho.
- Các thao tác kê hàng liên quan đến việc giao hàng và lưu trữ kho của các đối tượng sẽ được xếp chồng lên nhau theo nhóm trên các kệ hoặc trung thùng hàng.
- Việc xếp chồng và các thao tác giao hàng được thực hiện bằng tay cho một lượng lớn các sản phẩm sẽ rất vất vả và không hiệu quả
- Việc sử dụng robot kê hàng sẽ cho phép người vận hành kê một lượng lớn các sản phẩm theo đơn đặt hàng lên trên các pallet để dễ dàng di chuyển trong thời gian ngắn.
- Ví dụ robot kê hàng RV - 100TH Mitsubishi cho phép di chuyển vật hể lên đến 100 kg.
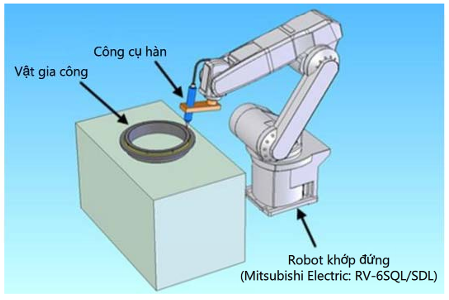
Ứng dụng định lượng
- Robot được trang bị đầu sơn gắn vào đầu cuối của chúng và được dùng cho các thao tác sơn vật liệu hàn, bao bì,...
- Những vật liệu đó phải được áp dụng cho các vùng bịt kín một cách thống nhất và liên tục.
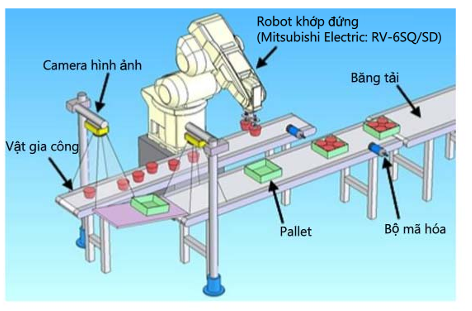
Ứng dụng Conveyor Tracking - theo dõi dây chuyền bằng hình ảnh
- Robot có thể thực hiện các tác vụ với sản phẩm di chuyển dọc băng tải mà không cần dừng băng tải.
- Việc vận chuyển sản phẩm trong lĩnh vực thực phẩm nói chung cần phải được vận chuyển theo các chu kỳ ngắn. Đó là lý do tại sao các thao tác theo dõi thường được sử dụng cho những ứng dụng trong đó băng tải có thể chạy mà không cần dừng lại.
- Camera được sủ dụng để theo dõi độ nghiêng của sản phẩm trên băng tải và phát hiện vị trí ngẫu nhiên của sản phẩm.
Nguồn: Mitsubishielectric.com

